Reconstrucción de modelo
Una vez completada la creación del modelo, haga clic en "Iniciar" para cargar los datos. Una vez completada la carga de datos, se abre la página de lista Mis modelos. En el proyecto específico dentro de la lista de modelos, haga clic en "Iniciar reconstrucción", luego haga clic en "Confirmar" en el aviso para comenzar la generación automática del modelo.
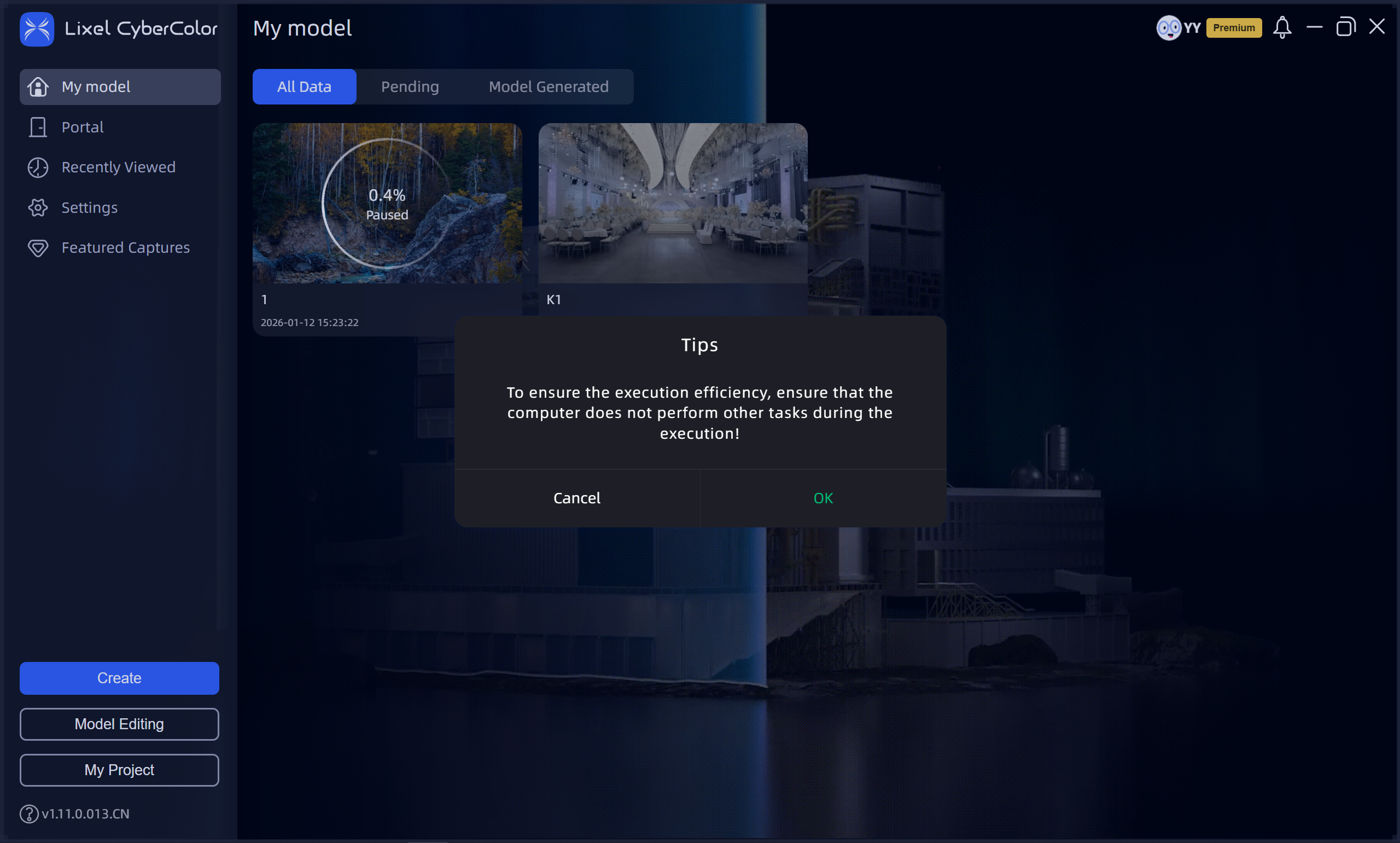
Iniciar reconstrucción
Tarjeta de modelo en reconstrucción
Nota:
- Al ejecutar tareas de reconstrucción por lotes, asegúrese de que todos los datos a procesar se hayan cargado antes de ponerlos en cola para la reconstrucción. Durante la reconstrucción, para evitar fallos, se recomienda no ejecutar otras tareas que consuman memoria de GPU en la computadora.
- Durante la reconstrucción, no cierre LCC Studio, de lo contrario la tarea de reconstrucción se interrumpirá.
- Al cargar datos de captura, asegúrese de que haya suficiente espacio en disco en el directorio de guardado de datos LCC. Reserve al menos el doble de espacio en disco respecto a los datos del proyecto de captura para evitar interrupciones o fallos por espacio insuficiente.
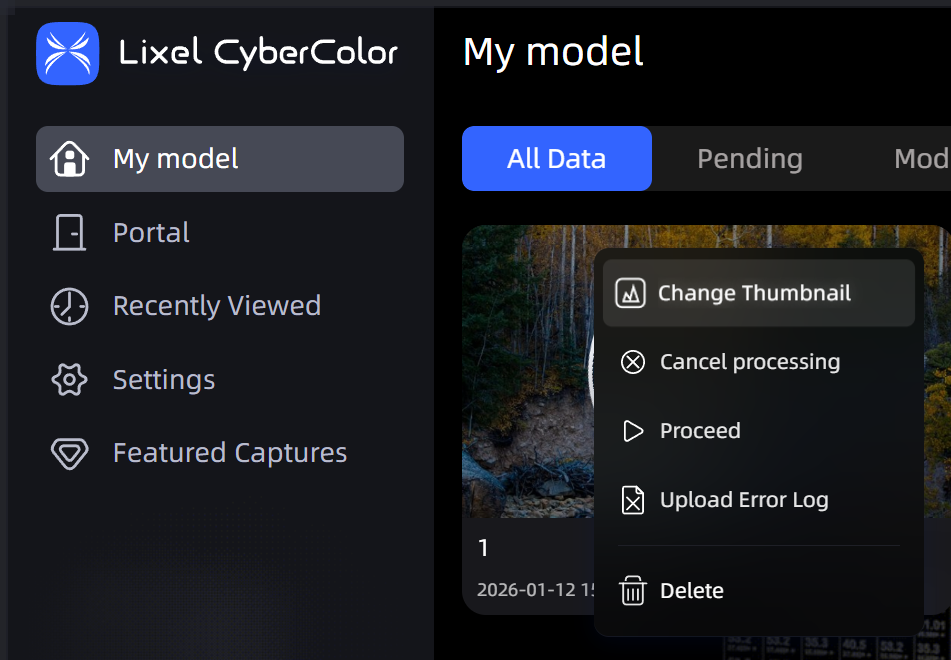
- Si se cierra LCC Studio durante la generación del modelo, la generación se interrumpe. Cuando se vuelve a abrir LCC Studio, el modelo muestra el fallo de reconstrucción y el progreso anterior. Haga clic en la esquina superior derecha de la tarjeta del modelo y seleccione "Continuar generando" o "Reiniciar generación" para volver a ingresar a la cola de generación del modelo.
Parámetros de reconstrucción
Calidad de reconstrucción
Las diferentes opciones de calidad (Rápida, Estándar, Lenta) generan modelos con diferentes relaciones señal-ruido. La reconstrucción lenta aumenta significativamente el consumo de VRAM. Aunque esto extiende el tiempo de generación del modelo, en última instancia produce resultados de mayor calidad.
Número máximo de puntos Gaussianos
En el modo de reconstrucción de modelo único, el número máximo de puntos Gaussianos limita directamente el recuento total de puntos del resultado final de la reconstrucción. Mantenga este valor dentro de la capacidad de VRAM (normalmente no más de 25M). Configurarlo demasiado alto puede causar insuficiencia de VRAM o rendimiento reducido en la reconstrucción, afectando la calidad y estabilidad del modelo final.
En los modos de Fusión de mapas, Fusión aire-tierra y Reconstrucción aérea, el número máximo de puntos Gaussianos solo se aplica a la escala de reconstrucción de los bloques individuales y no limita el recuento total de puntos Gaussianos del modelo completo final. LCC Studio ajusta automáticamente el rango de reconstrucción de cada bloque según el tamaño del modelo, por lo que incluso configurar el número máximo de puntos Gaussianos por encima de 25M no afectará significativamente el resultado general de la reconstrucción.
Optimización de portabilidad
Le ayuda a generar modelos LCC compatibles con la mayoría de los dispositivos para su carga. Cuando la optimización está habilitada, los modelos LCC se reducen en tamaño con mayor fluidez, adaptándose a la mayoría de los requisitos de modelo y mejorando especialmente la calidad de renderizado móvil. Cuando la optimización está deshabilitada, se pueden lograr efectos de iluminación más realistas, pero pueden causar degradación del rendimiento o interrupciones.
Opciones de depuración
Las opciones de depuración son un conjunto de parámetros de configuración avanzada para usuarios avanzados o desarrolladores, utilizados para ajustar finamente el proceso de reconstrucción 3D, diagnosticar anomalías o manejar requisitos de precisión y compatibilidad en escenarios de modelos específicos.
Optimización de exposición:
Optimiza específicamente los problemas de artefactos flotantes en escenas con cambios dramáticos de iluminación (como transiciones de interior a exterior), pero puede causar una ligera degradación de detalles en áreas brillantes/oscuras. Active esta opción solo cuando encuentre estos problemas.
PPR (Tasa de participación de nube de puntos):
Si se produce adherencia del cielo (p. ej., en los bordes de árboles o edificios), intente reconstruir con un PPR reducido.
Nota: La adherencia generalmente es causada por una captura desde un solo ángulo. Complemente con múltiples ángulos y alturas durante la captura para obtener los mejores resultados.

Antes de la reducción (Normal)

Después de la reducción (Bajo)
Datos RTK:
⚠️ Desde la versión v2.0.0, esta opción ha sido reemplazada por la función "Conversión de sistema de coordenadas". El interruptor [Datos RTK] ya no está disponible en las Opciones de depuración. Consulte la sección Conversión de sistema de coordenadas a continuación.
Notas de la versión v1.x (haga clic para expandir)
Controla si los datos RTK registrados durante el escaneo se utilizan en el proceso de reconstrucción:
- Auto: LCC Studio intenta utilizar los datos RTK primero. Si se detectan anomalías, omite automáticamente los datos RTK para garantizar una reconstrucción estable y fiable.
- Desactivar: Ignora completamente los datos RTK. El resultado no contendrá información de coordenadas absolutas y no podrá utilizarse para Fusión de mapas o alineación aire-tierra, pero puede evitar problemas causados por datos RTK anómalos.
Modo especial SLAM:
Puede seleccionar un modo SLAM que coincida con su entorno de uso para obtener mejores resultados de reconstrucción:
- Auto (Recomendado): Coincide inteligentemente con la mejor estrategia de reconstrucción. Prioriza el modo de alta precisión; si se detecta vibración o interferencia que cause fallos, cambia automáticamente al modo robusto para reintentar, garantizando la tasa de éxito de la reconstrucción. Adecuado para la mayoría de escenarios.
- Ninguno: Persigue alta precisión de modelado, adecuado para dispositivos estables y entornos claros. La reconstrucción puede fallar si se produce vibración o interferencia durante la captura.
- Modo robusto (Predeterminado): Adecuado para la mayoría de escenarios, equilibrando precisión y estabilidad con cierta resistencia a interferencias durante la captura.
- Escena estrecha: Optimizado específicamente para entornos estrechos como túneles, pozos de minas y pasillos largos. Usar esto en escenarios normales puede causar fallos.
Previsualización de nube de puntos previa a la reconstrucción
Después de cargar los datos de captura y antes de iniciar la reconstrucción, utilice la herramienta de previsualización de nube de puntos para ver la trayectoria de captura y la nube de puntos.
Pasos: Cargar datos de captura - Hacer clic en Previsualización de nube de puntos.
LCC Studio verifica cada indicador sucesivamente. Ajuste los datos de captura según los resultados antes de la reconstrucción para mejorar la tasa de éxito y la calidad.
Después de que se complete la verificación, haga clic en Ver nube de puntos para abrir la herramienta de previsualización y ver la trayectoria de captura y la nube de puntos aproximada del escaneo.
La herramienta de previsualización de nube de puntos funciona de la misma manera que LCC Scene Editor.
Conversión de sistema de coordenadas
Cuando sus datos de escaneo contienen información de posicionamiento RTK, puede configurar la conversión del sistema de coordenadas en el panel de parámetros de reconstrucción para que el resultado de la reconstrucción se entregue directamente en el sistema de coordenadas de destino, facilitando la superposición con datos GIS/BIM.
Esta función reemplaza la opción de depuración heredada "Datos RTK". La versión heredada requería juzgar manualmente la disponibilidad de RTK y seleccionar "Auto/Desactivar"; la nueva versión delega este juicio al sistema automáticamente — si los datos RTK están disponibles, el sistema completa la conversión de coordenadas automáticamente; si los datos RTK no están disponibles o son anómalos, el sistema omite la conversión de coordenadas y genera el modelo normalmente sin afectar el resultado de la reconstrucción. Simplemente seleccione el sistema de coordenadas de destino.
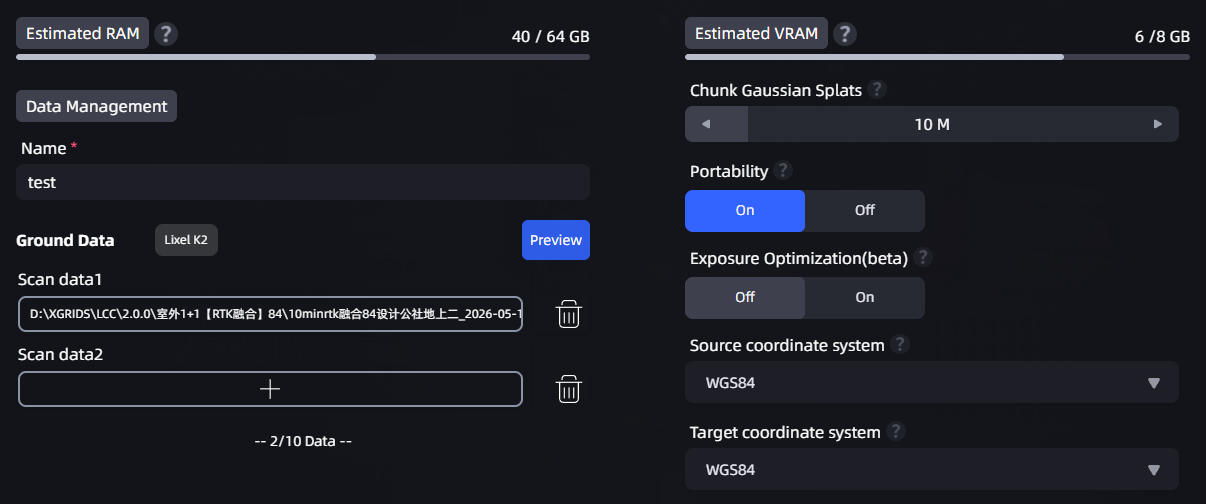
Ubicación del menú desplegable de conversión de sistema de coordenadas en el panel de parámetros de reconstrucción
Cómo configurar
- En el panel de parámetros de reconstrucción, encuentre los menús desplegables "Sistema de coordenadas de origen" y "Sistema de coordenadas de destino".
- El sistema de coordenadas de origen se identifica automáticamente a partir de sus datos de escaneo (por defecto WGS84 cuando hay RTK presente).
- Seleccione el sistema de coordenadas que necesita en el menú desplegable "Sistema de coordenadas de destino".
- Haga clic en Iniciar reconstrucción. Cuando la reconstrucción se complete, la nube de puntos se convierte automáticamente al sistema de coordenadas seleccionado.
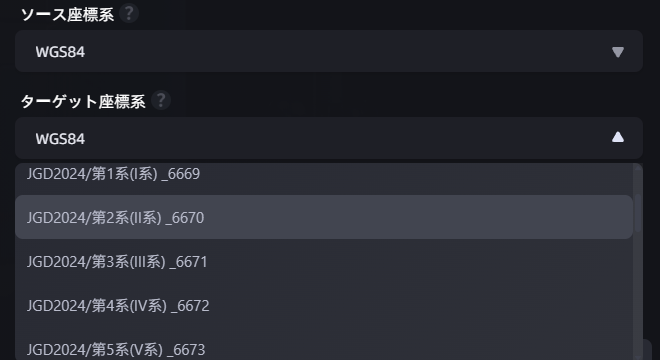
Menú desplegable de sistema de coordenadas de destino expandido
Sistemas de coordenadas disponibles
Las opciones de sistemas de coordenadas disponibles varían según la configuración de idioma de su software:
| Idioma del software | Sistemas de coordenadas de destino disponibles |
|---|---|
| Chino simplificado | Ninguno · WGS84 · CGCS2000 |
| Japonés | Ninguno · WGS84 · Sistemas de coordenadas de Japón (19 zonas) |
| Inglés | Ninguno · WGS84 |
- Seleccionar "Ninguno" no aplica ninguna conversión de coordenadas y genera el sistema de coordenadas local (comportamiento predeterminado).
- Seleccionar otro sistema de coordenadas requiere datos de escaneo que contengan información de posicionamiento RTK.
Lógica de manejo de errores
| Escenario | Comportamiento del sistema |
|---|---|
| Los datos RTK son normales | Completa automáticamente la conversión de coordenadas; el modelo contiene información de coordenadas absolutas |
| Los datos RTK son anómalos (pérdida de señal/precisión insuficiente/fix falso) | Omite automáticamente la conversión de coordenadas; el modelo se genera normalmente pero sin coordenadas absolutas |
| No hay datos RTK (p. ej., captura en interiores) | La opción de sistema de coordenadas muestra automáticamente "Ninguno" y no se puede cambiar; el modelo se genera normalmente |
Nota: Si los datos de escaneo no contienen información RTK, la opción de sistema de coordenadas muestra "Ninguno" y no se puede cambiar. Al seleccionar un sistema de coordenadas de Japón, debe seleccionar además la zona específica (1–19).
Optimización de capas
En el panel colapsable de Ajuste avanzado, se ha agregado un interruptor de "Optimización de capas", habilitado de forma predeterminada. Esta función solo se aplica a datos de escaneo de dispositivos Lixel P1 (Pcam); para otros dispositivos, el interruptor aparece en gris y no está disponible.
Cómo funciona
"Capas" se refiere a anomalías visuales en el modelo reconstruido como desalineación, efecto fantasma o fracturas estructurales (p. ej., una pared que aparece como dos capas, o el piso y el techo desplazados). Estos problemas suelen ocurrir durante la captura de trayectorias de bucle de gran alcance debido a la acumulación de deriva de posicionamiento.
La Optimización de capas corrige esta deriva acumulada mediante la detección de cierre de bucle. Al escanear una trayectoria de bucle grande (como recorrer un pasillo, moverse entre múltiples pisos o pasar por la misma área varias veces en una escena grande), habilitar esta función reduce significativamente la desalineación y el efecto fantasma del modelo.
Cuándo habilitarla (Predeterminado)
- Escenas de bucle grande (recorrer un pasillo largo, múltiples pisos, o pasar por la misma área varias veces en una escena grande)
Cuándo deshabilitarla
- Escenas con múltiples áreas de textura o diseño muy similar (como cubículos, pisos repetidos, pasillos simétricos o tiendas de cadena)
Nota: En escenas con texturas similares, la Optimización de capas puede identificar erróneamente diferentes ubicaciones como la misma ubicación, causando distorsión estructural en el modelo. Si el resultado de la reconstrucción parece anormal, intente deshabilitar este interruptor y reconstruir.