Reconstrucción de modelo único
Flujo de trabajo
Cargar datos de captura
- Datos de captura: Cargue archivos de datos capturados por los dispositivos escáner XGRIDS. La interfaz muestra el tipo de dispositivo correspondiente.

Datos de captura
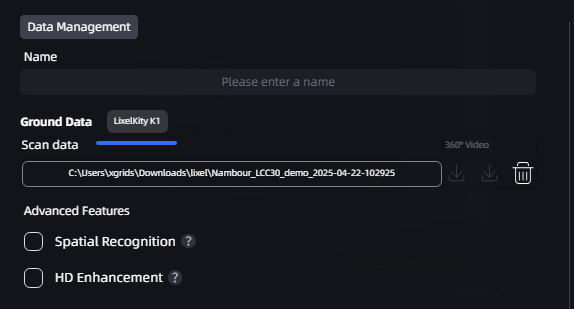
Visualización del tipo de dispositivo
Establecer nombre del modelo y parámetros
- Modo de baja memoria: Cuando la memoria del dispositivo es insuficiente, active el Modo de baja memoria. Este escribe algunos datos intermedios en disco en lugar de mantenerlos en memoria, reduciendo el uso máximo de memoria. Este modo puede extender el tiempo de reconstrucción pero mejora la estabilidad operativa y reduce los fallos causados por memoria insuficiente.
Nota: La opción de Modo de baja memoria solo aparece en el modo de reconstrucción de Modelo único.
Funciones avanzadas
Reconocimiento inteligente del espacio
Al reconstruir entornos interiores, active la función "Reconocimiento inteligente del espacio". LCC Studio identifica automáticamente estructuras interiores como paredes, puertas y ventanas y las organiza en un plano inteligente claro, útil para comprender la distribución de las habitaciones y adecuado para el análisis espacial interior, la planificación de reformas o la preparación para modelado BIM.
Mejora HD
Durante el escaneo, algunas áreas clave (como edificios emblemáticos, maquinaria, detalles decorativos, etc.) pueden requerir mayor detalle y calidad de textura. En estos casos, utilice la función de Mejora HD tomando fotos adicionales de estas áreas con dispositivos de alta definición como teléfonos inteligentes o cámaras DSLR. Estas fotos de alta definición pueden combinarse con los datos originales del escaneo para mejorar el detalle y la calidad de textura en las áreas clave, haciendo que el modelo reconstruido sea más claro.
Notas:
- Rendimiento del dispositivo: La Mejora HD y el Reconocimiento inteligente del espacio tienen ciertos requisitos de rendimiento del equipo — la VRAM de la GPU debe ser mayor a 8 GB para un funcionamiento normal. Una VRAM de GPU insuficiente impedirá que estas funciones funcionen.
- Fotos de Mejora HD: Todas las fotos complementarias deben tomarse con el mismo dispositivo, de lo contrario el reconocimiento puede verse afectado o fallar. Los formatos de imagen compatibles incluyen JPG, PNG, JPEG.
- Cantidad de fotos admitida:
- Lixel serie L: 20–500 fotos
- PortalCam: 20–1000 fotos con puntos de control de Mejora HD; 20–500 fotos sin puntos de control
Notas sobre dispositivos K2
Los dispositivos K2 admiten los siguientes tipos de reconstrucción:
| Tipo de reconstrucción | Soporte | Notas |
|---|---|---|
| Reconstrucción de escena única | ✅ Admitido | Duración máxima de captura de escena única: 90 minutos |
| Fusión de mapas | ✅ Admitido | Fusión y cosido entre múltiples modelos de escena única K2 |
| Fusión aire-tierra | ✅ Admitido | Reconstrucción conjunta desde escaneo terrestre + imágenes aéreas de dron + fotos de punto de despegue/aterrizaje |
| Reconstrucción aérea | Próximamente | Se habilitará en una versión futura |
| Reconocimiento inteligente del espacio | Próximamente | Se habilitará en una versión futura |
| Mejora HD | Próximamente | Se habilitará en una versión futura |
Nota:
- La Fusión de mapas con K2 admite hasta 10 subescenas por ejecución.
- La Fusión aire-tierra con K2 requiere datos de escaneo terrestre, imágenes de dron y fotos de punto de despegue/aterrizaje juntos; la reconstrucción no puede iniciarse si falta alguno de ellos.
- La Reconstrucción aérea, el Reconocimiento inteligente del espacio y la Mejora HD se habilitarán en versiones futuras y actualmente aparecen en gris.
Visualización del progreso de reconstrucción
Después de que comience la reconstrucción, la tarjeta del modelo en la lista Mis modelos muestra el progreso de la reconstrucción en tiempo real:
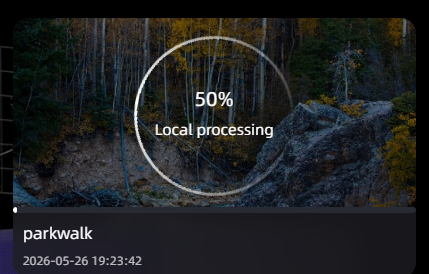
Tarjeta de modelo en reconstrucción (progreso circular general + barra de progreso de etapa)
- Progreso general (circular): Muestra el progreso general de la reconstrucción del 0% al 100%; el progreso solo aumenta.
- Barra de progreso de etapa: La parte inferior de la tarjeta muestra el progreso detallado de la etapa actual.
- Texto de estado: Muestra el estado actual, como "Reconstruyendo localmente", "Pausado" o "En cola".
Después de que se complete la reconstrucción, la tarjeta cambia a la miniatura del modelo.
Nota: Para pausar durante la reconstrucción, haga clic en el botón de pausa; el anillo de progreso se vuelve gris y muestra la etiqueta "Pausado". Al reanudar, continúa desde el punto de interrupción.