モデル再構築
モデルの作成が完了したら、【開始】をクリックするとデータが読み込まれ、データの読み込み完了後にマイモデルリストページに移動します。モデルリストの具体的なプロジェクトで【再構築を開始】をクリックし、プロンプトで【確定】をクリックすると、プロジェクトのモデル自動生成が始まります。
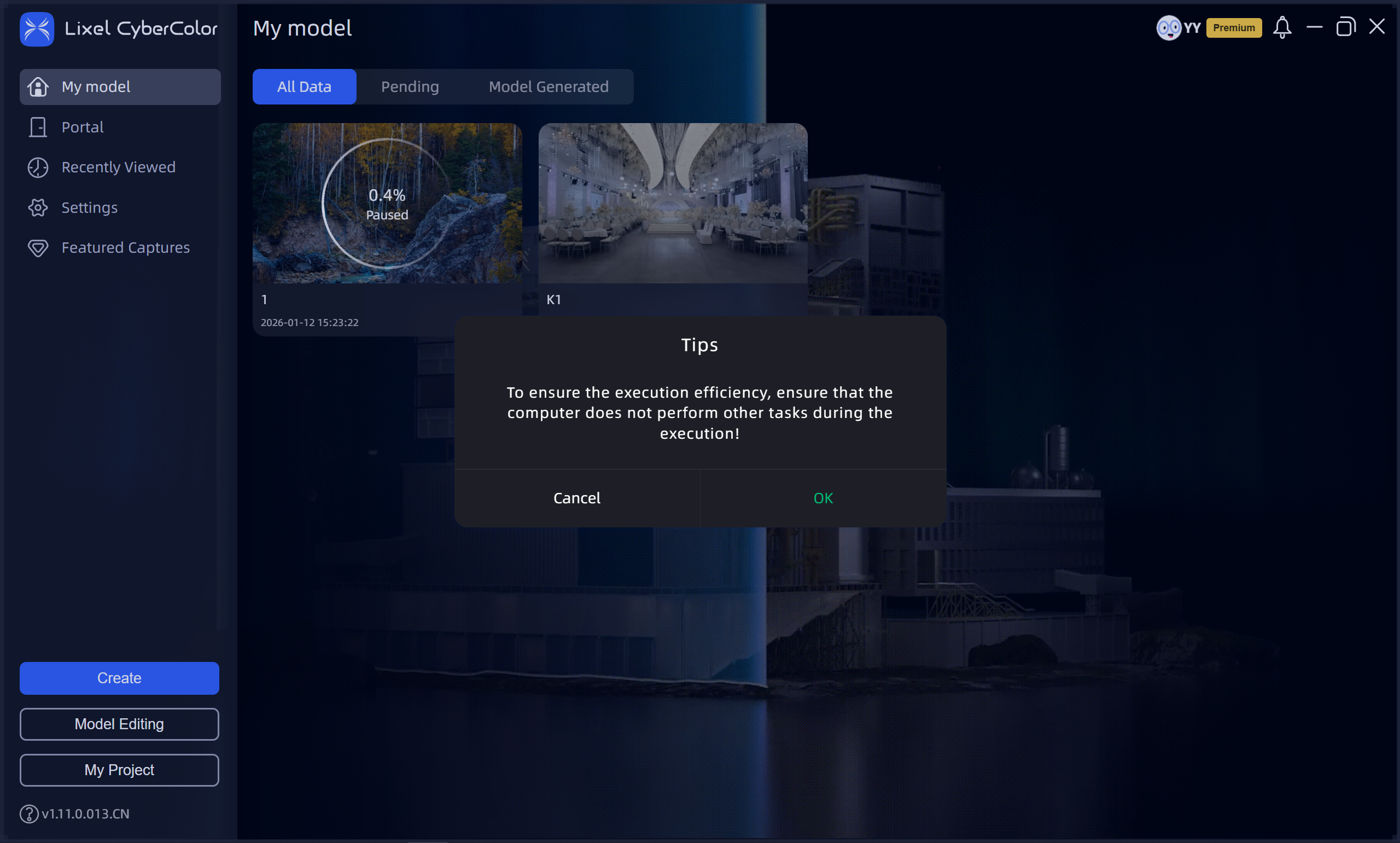
再構築を開始
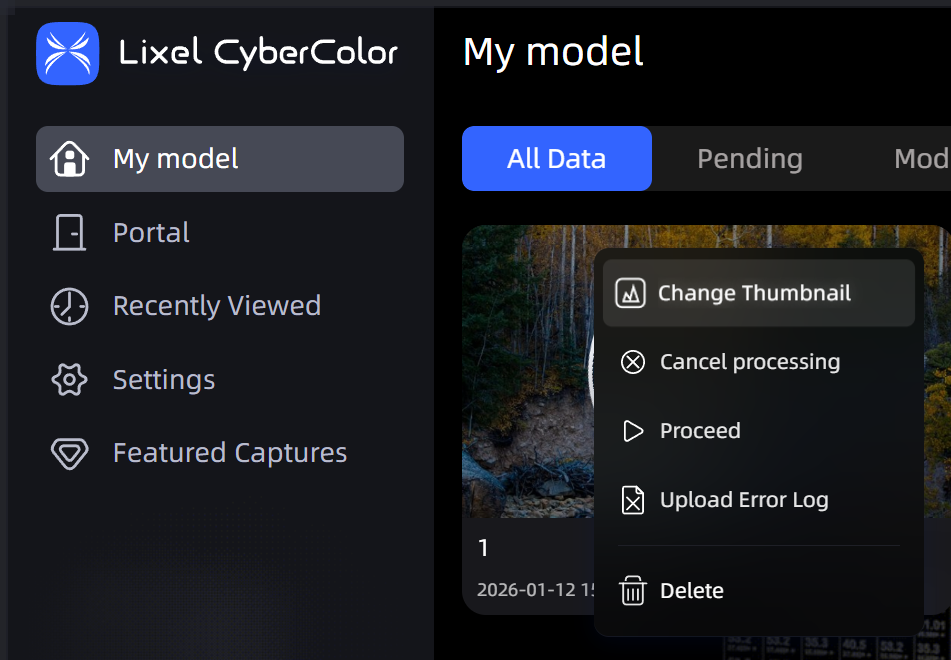
再構築モデルカード
注:
- バッチ再構築タスクの実行時は、処理対象のすべてのデータのアップロードが完了してから、キュー再構築を実行してください。再構築プロセス中は、再構築失敗を避けるため、コンピュータでVRAMを消費する可能性のある他のタスクを実行しないことをお勧めします。
- 再構築プロセス中は LCC Studio ソフトウェアを閉じないでください。閉じると再構築タスクが中断されます。
- キャプチャデータのアップロード時は、LCC データの保存ディレクトリのディスク容量が十分であることを確認してください。予備のディスク容量はキャプチャプロジェクトデータ量の少なくとも2倍を確保し、容量不足による再構築プロセスの中断や失敗を防いでください。
- モデル生成中に LCC Studio ソフトウェアを閉じると、生成が中断されます。次に LCC Studio を開いた際、そのモデルには再構築失敗と以前の再構築進行状況が表示されます。そのモデルカードの右上をクリックし、【続行】または【最初から再生成】をクリックすると、モデル生成のキューに再び入れます。
再構築パラメータの説明
再構築効率
異なる効率オプション(高速、標準、低速)により、異なるSN比のモデルを生成できます。低速再構築はVRAMの消費を大幅に増加させ、モデル生成時間が長くなりますが、最終的により高品質なモデル結果が得られます。
最大ガウススプラット数
単一モデル再構築モードでは、最大ガウススプラット数が最終再構築結果の全体ポイント数を直接制限するため、VRAMの許容範囲内(通常25M以下)に保つことをお勧めします。高すぎる値を設定するとVRAM不足や再構築パフォーマンスの低下を招き、最終モデルの品質と安定性に影響する可能性があります。
地図合成、空地融合、航空撮影再構築モードでは、最大ガウススプラット数は単一ブロックの再構築規模にのみ作用し、最終的な完全モデルの総ガウススプラット数は制限しません。システムがモデルサイズに応じて各ブロックの再構築範囲を自動調整するため、最大ガウススプラット数を25M以上に設定しても、最終的な全体再構築結果に顕著な影響はありません。
クロスプラットフォーム最適化
ほとんどのデバイスでの読み込みに適応する LCC モデルの生成を支援します。最適化を有効にすると、LCC モデルのサイズが縮小しスムーズさが向上し、大多数のモデルニーズに適応します。特にモバイル端末のレンダリング品質が向上します。最適化を無効にすると、よりリアルな光影効果が得られますが、パフォーマンスの低下やカクつきが発生する可能性があります。
デバッグオプション
デバッグオプションは、上級ユーザーや開発者向けの高度な設定パラメータのセットで、3D再構築フローの調整、異常問題の診断、または特定のモデルシーンでの精度と互換性のニーズに対応するために使用されます。
露出最適化:
室内から室外へ、およびその他の光照が大きく変化するシーンでのフローティングアーティファクト問題を重点的に最適化します。ただし、明暗部分のディテールがわずかに劣化する可能性があります。このような問題に遭遇した場合にのみ、有効化を試みることをお勧めします。
PPR(点群参加率):
空の粘着現象(例えば木や建物のエッジ)が発生する場合は、PPRを下げて再構築を試みてください。
注:粘着は通常、キャプチャ角度が単一であることが原因です。キャプチャ時に多角度・多高度を補充して最適な結果を得ることをお勧めします。

低減前(通常)

低減後(低)
RTKデータ:
⚠️ v2.0.0 以降、このオプションは「座標系変換」機能に置き換えられ、デバッグオプションに【RTKデータ】スイッチは提供されなくなりました。下記の座標系変換セクションをご参照ください。
v1.x バージョンの説明(クリックして展開)
再構築プロセスでスキャン時に記録された RTK データを使用するかどうかを制御します:
- 自動:システムは優先的に RTK データの使用を試み、データ異常が検出された場合は自動的に使用しないことで、再構築結果の安定性と信頼性を確保します。
- 無効:RTK データを完全に無視します。結果に絶対座標情報は含まれず、地図合成や空地アラインメントには使用できませんが、異常な RTK によって引き起こされる問題を回避できます。
SLAM特殊モード:
使用環境に合った SLAM モードを選択することで、より良い再構築結果が得られます:
- 自動(推奨):最適な再構築戦略をインテリジェントにマッチングします。高精度モードを優先的に試み、振動や干渉による失敗が検出された場合は自動的に安定モードに切り替えてリトライし、再構築の成功率を確保します。ほとんどのシーンに適しています。
- なし:高いモデリング精度を追求し、デバイスが安定しており環境がクリアな場合に適しています。キャプチャ時に振動や干渉があると再構築が失敗する可能性があります。
- 安定モード(デフォルト):ほとんどのシーンに適しており、精度と安定性のバランスをとり、キャプチャ中のある程度の干渉耐性があります。
- 狭小空間シーン:トンネル、坑道、長い廊下などの狭い環境に最適化されています。一般的なシーンで使用すると失敗する可能性があります。
再構築前の点群プレビュー
キャプチャデータのアップロード後、再構築タスクを開始する前に、点群プレビューツールを使用してキャプチャ・パスと点群を確認できます。
操作手順: キャプチャデータのアップロード完了後 - 点群プレビューをクリック。
システムが各項目の指標を順次チェックします。チェック結果に基づいてキャプチャデータを調整してから再構築を行うことで、再構築の成功率と品質を向上させることができます。
チェック完了後、「点群を見る」をクリックして点群プレビューツールページに入り、キャプチャ・パスと粗スキャン点群を確認できます。
点群プレビューツール内の操作方法は LCC Scene Editor と同じです。
座標系変換
スキャンデータに RTK 位置情報が含まれている場合、再構築パラメータパネルで座標系変換を設定し、再構築成果物をターゲット座標系に直接出力して GIS/BIM データへの重ね合わせを容易にすることができます。
この機能は旧版の「RTKデータ」デバッグオプションに代わるものです。旧版ではユーザーが手動で RTK の使用可否を判断し「自動/無効」を選択する必要がありましたが、新版ではこの判断をシステムが自動的に行います。RTK データが使用可能な場合、システムが自動的に座標変換を完了します。RTK データが使用不可能または異常な場合、システムは自動的に座標変換をスキップし、モデルを正常に出力します。再構築結果には影響しません。ターゲット座標系を選択するだけで構いません。
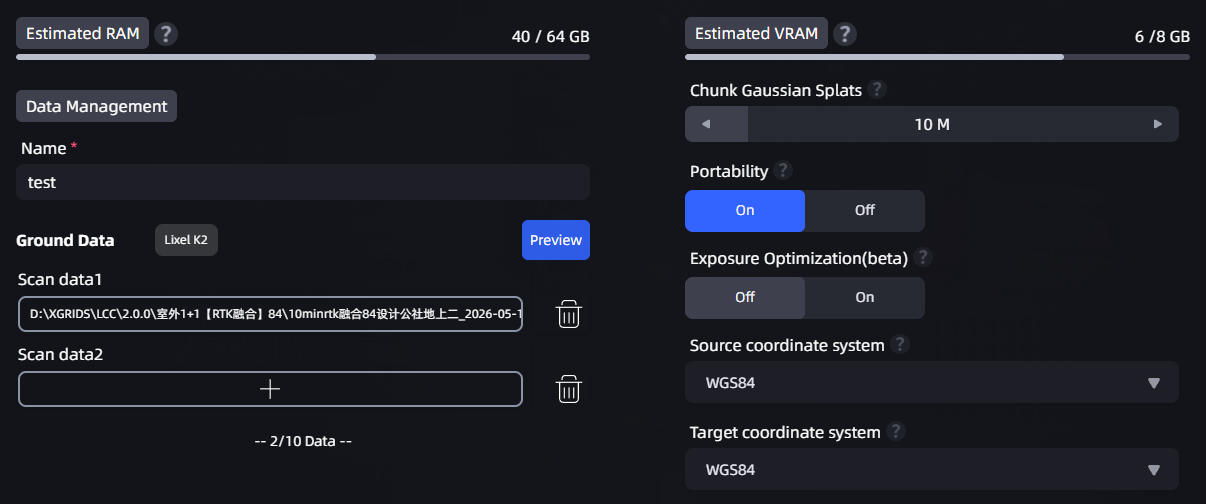
再構築パラメータパネル内の座標系変換ドロップダウンの位置
設定方法
- 再構築パラメータパネルで「ソース座標系」と「ターゲット座標系」のドロップダウンを見つけます。
- ソース座標系はスキャンデータに基づいて自動認識されます(RTK がある場合はデフォルトで WGS84)。
- 「ターゲット座標系」のドロップダウンで必要な座標系を選択します。
- 再構築を開始をクリックすると、再構築完了後に点群が選択した座標系に自動変換されます。
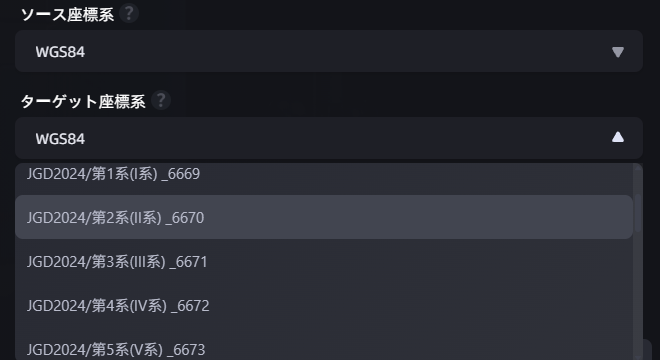
ターゲット座標系ドロップダウンの展開状態
選択可能な座標系
ソフトウェアの言語設定に応じて、表示される座標系オプションが異なります:
| ソフトウェア言語 | 選択可能なターゲット座標系 |
|---|---|
| 簡体字中国語 | なし · WGS84 · CGCS2000 |
| 日本語 | なし · WGS84 · 日本座標系(19分帯を含む) |
| English | None · WGS84 |
- 「なし」を選択した場合は座標変換を行わず、ローカル座標系で出力します(デフォルト動作)。
- その他の座標系を選択する場合は、スキャンデータに RTK 位置情報が含まれている必要があります。
異常処理ロジック
| シーン | システムの動作 |
|---|---|
| RTK データ正常 | 座標変換を自動完了し、モデルに絶対座標情報を含む |
| RTK データ異常(信号ロス/精度不足/擬似固定) | 座標変換を自動スキップし、モデルは正常に生成されるが絶対座標は含まれない |
| RTK データなし(室内キャプチャなど) | 座標系オプションが自動的に「なし」と表示され変更不可、モデルは正常に生成 |
注:スキャンデータに RTK 情報が含まれていない場合、座標系オプションは「なし」と表示され変更できません。日本座標系を選択する場合は、さらに具体的な分帯区域(1〜19号)を選択する必要があります。
分層最適化(Layering Optimization)
Advanced Tuning 折りたたみパネルに「分層最適化」スイッチが追加されました(デフォルトで有効)。この機能はLixel P1(Pcam)デバイスのスキャンデータにのみ有効で、その他のデバイスではスイッチがグレーアウトされ使用できません。
機能説明
「分層」とは、再構築完了後にモデルにずれ、二重写り、構造断裂などの視覚的異常が発生することを指します(例:同じ壁が2層に見える、床と天井がずれるなど)。この類の問題は通常、大範囲の環状パスキャプチャ時に位置決めの累積偏差によって発生します。
分層最適化はループクロージャー検出を通じてこれらの累積偏差を修正します。大きなループパス(廊下の一周、複数フロアの上下移動、大規模シーンで同じエリアを複数回通過するなど)をスキャンした場合、この機能を有効にすることでモデルのずれや二重写りを大幅に軽減できます。
有効化を推奨する場合(デフォルト)
- 大きなループのあるシーン(長い廊下の一周、複数フロア、大規模シーンで同じエリアを複数回通過)
無効化を推奨する場合
- シーン内にテクスチャやレイアウトが非常に類似した複数のエリアがある場合(パーティション、繰り返しフロア、対称廊下、チェーン店舗など)
注:テクスチャが類似したシーンでは、分層最適化が異なる位置を同一位置と誤判定し、モデルの構造が歪む可能性があります。再構築結果に異常が見られた場合は、このスイッチを無効にしてから再構築を試みてください。